Brief introduction
Project Specification
Our research activities cover the area of Artificial intelligence, Knowledge and Process management, in particular from the logical point of view. We deal with investigating current methods as well as developing new ones, namely methods and systems based on a rigorous logical framework, which lay emphasis on the integration of syntax as well as correct fine-grained semantics. As a result, major research activities covered by LabIS can be summarised as follows:
- Multi-agent Systems;
- Logical Analysis of Natural Language;
- Specification Languages Based on Natural Language;
- Knowledge Representation;
- Inference Machines;
- Non-monotonic Reasoning and Belief Revision;
- Process Management, Control and Coordination;
- Process Simulation and Prediction.
The pilot project conducted in the laboratory is Logic and Artificial Intelligence for Multi-Agent Systems. The subject of the project can be summarized as research of information technologies needed for coordination of autonomous intelligent agents in extraordinary or emergency situations.
We aim at modelling and predicting critical situations which typically tend to exhibit unordered and chaotic behaviour. The use of information technologies as a means to control and coordinate real processes is well researched in the areas under normal conditions, i.e., when nothing extraordinary is occurring. However, extraordinary or critical situations, when some or all of the usual rules fail and the need for coordination and communication rapidly grows, have not been sufficiently studied so far.
Our research is focused on the following three basic areas:
- Process control;
- Knowledge management;
- Communication and infrastructure.
In the current state of the project, agents are modelled in a simulated, simplified environment, in which particular methods are tested and developed. Since it is necessary to control the agents operating in space and time, a special field of interest is geo-informatics, which processes space-structured temporal data (also called geodata).
A theoretical background is needed to pursue research in all three areas. We concentrate on the development of a platform that affords a fine-grained natural-language analysis, specified in a formal language, which enables us to adequately represent knowledge in the multi-agent world. The external representation of particular pieces of knowledge will make it possible to design intelligent and relatively autonomous systems that can and must communicate with each other in a (pseudo-) natural language. Last but not least, the analysis and synthesis of intelligent systems that can derive useful conclusions under incomplete or imprecise knowledge is also studied.
We work under the assumption that in order to handle critical situations, communication and knowledge representation in a quasi-natural language is the most important part of the research. The underlying logical framework of the project is Pavel Tichy's Transparent Intensional Logic (TIL); an adequate knowledge representation is provided by TIL, and we distinguish between three kinds of knowing:
- implicit (which leads to an 'explosion' of knowledge and the paradox of omniscience);
- explicit (which deprives an agent of any inferential capabilities);
- inferable (of a realistic agent with some inferential capabilities, who, however, is not logically omniscient).
The stock of inferable knowledge of a particular agent A is the stock of knowledge that A is able to infer from a given stock of A's explicit knowledge by means of one or more rules of inference that A is able to use. Knowing is represented as a relation-in-intension between an agent and a construction (a structured abstract object that is a hyperintensionally individuated mode of presentation of a possible-world semantic proposition) rather than a set of possible worlds or a piece of syntax.
We develop the TIL-Script language, which is a FIPA-style content language for multi-agent systems (see VŠB - TUO TIL Site and http://www.fipa.org). TIL-Script can be treated as a bridge between TIL and multi-agent systems. It provides a complex tool for natural-language analysis and can easily be implemented into systems following FIPA standards. The Main features of TL are:
- powerful declarative programming language;
- exact transparent semantics based on TIL;
- great expressive power adequate for natural language analysis;
- compliance with FIPA standards for content language;
- appropriate for multi-agent systems implementation.
Using the TL language, we thus concentrate on communication of particular agents operating in distinct domain areas.
Logic & MAS: components
Method of analysis; example
Inferable Knowledge Theory
defined as the least fixed-point of the function Infa containing an agent's explicit knowledge relativized to agent's inferential abilities
We compute the limit of the stock of knowledge an agent is able to infer from its explicit knowledge base.
The logic is proposed as the logic that accommodates the philosophical desiderata that should be met in a multi-agent world
Applications
AgentStudio
AgentStudio is a software tool for MAS development and simulation. The first part of this tool is represented by an
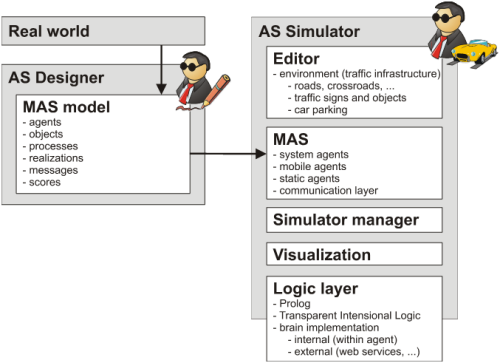
AgentStudio Designer that is dedicated for specification purposes. The second part covers a
simulation application designed purely for traffic
simulations now. It is called AgentStudio Simulator.
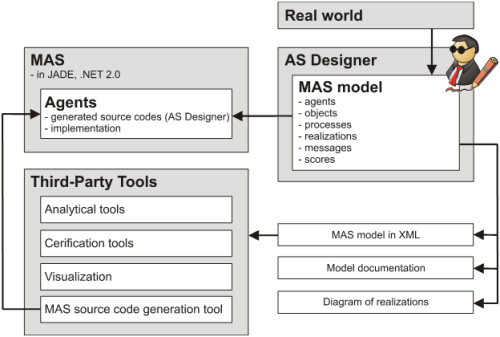
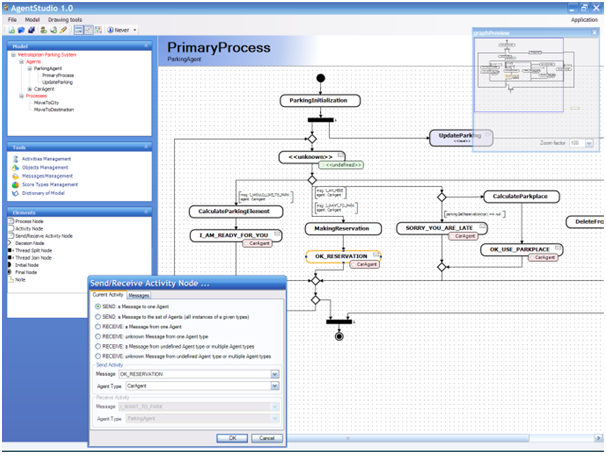
The AgentStudio Designer has been developed for purposes of process flows specifications, modeling and their transformation. It provides entire processes specification thanks to Agent Behavior Diagrams (ABD). ABD covers standard technique of UML Activity Diagrams extended by new structural elements, executive elements and rules [6]. This tool has several outputs including documentation and graphic representation of internal agents behaviors (Traffic MAS architecture chapter). An implementation of modeled agents based on the semi-automatic source codes generation will be the prime result of our research because it is not complete yet. These source codes link automatic generated skeletons (classes, methods, objects, architecture, etc.) and particular implementation of atomic activities. Of course, more complex codes have to be completed by programmers and adapted for a given MAS framework (e.g. JADE).
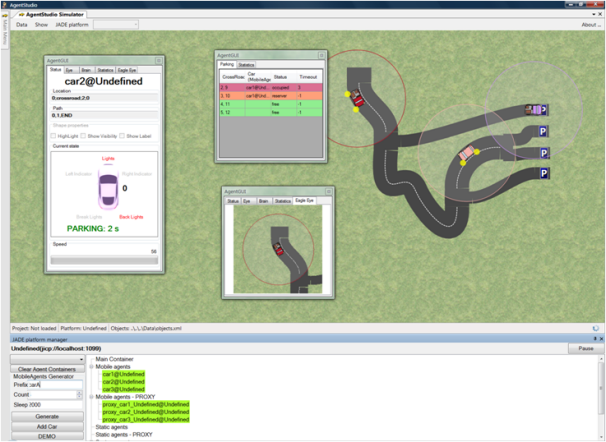
Traffic simulations try to reflect real situations taking place on roads. Nowadays, AgentStudio Simulator allows us to design and edit simplified infrastructure to test agents behaviors. In the future, it will also enable to import real GIS data. These are important situations which we focused on: Cars overtake each other and they will recognize traffic obstacles, they safety pass through crossroads, they keep safety distance from other agents (cars), they keep basic rules defined in Highway Code. Previously mentioned situations make basic elements within agent behavior design process. Particular situation is solved during agents life with respect to its ability to make a decision. Finally, MAS development and simulation can be divided into steps mentioned below.
Agent simulation based on real data
Agent environment is now implemented on the real road network which help as verify behavior of intelligent mobile agents in more realist manner. The overall architecture of the simulation environment and the creation process is depicted at figure 1. Information about real world (roads, crossroads etc.) is stored as GIS data (Shapefiles or geographic database), subsequently transformed into internal object representation using programming language like Java or .Net. This object representation serves as virtual world for mobile agents (vehicles) moving through the road network. Representation of road network was inspired by the topological lane model presented in
project NextMAP. The project NextMAP is resarch project to define, prototype, and evaluate the content of digital map databases required for future in-vehicle ITS aplication.
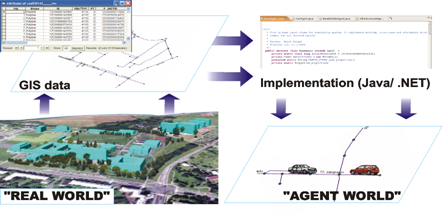
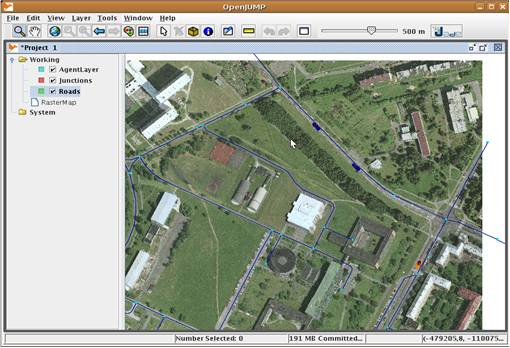
The other benefit of connection GIS applications and simulator is visualization of traffic simulation. The process of visualization perform a special visualization agent which can be implemented to the any GIS application. In the instance, visualization agent is running as plug-in of OpenJUMP. The connection of GIS application with simulator is build on ability of visualization agent to communicate with the world agent. The world agent holds states and positions of all objects of traffic infrastructure and information about positions of mobile agents. The visualization agent periodically request information from world agent about mobile agents position and transform them to the geographic coordinates. The coordinates of mobile agents than can be easily visualized or stored at the GIS. For example, GIS visualization can placed the traffic simulation on digital terrain model or aerial photography as is depicted at figure below.
TIL Script more info
TIL-Script is a new powerful, declarative programming language. The language is based on Pavel Tichy's Transparent Intensional Logic (TIL for short). From the formal point of view, TIL is a partial, hyper-intensional lambda calculus. Thus TIL-Script combines the features of classical lambda calculi as known from Church's or Barendregt's work, enriched with partiality and hyper-intensionality. By the latter we mean the fact, that the meaning of our lambda terms is not a denoted function, but the respective procedure (a general algorithm) the output of which is the denoted function.
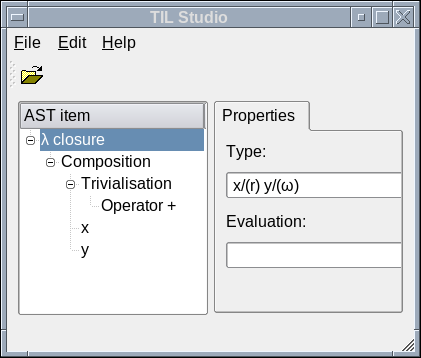
We also develop tools for TIL-Script language like TIL-Studio for analysing the TIL-Script sentences.
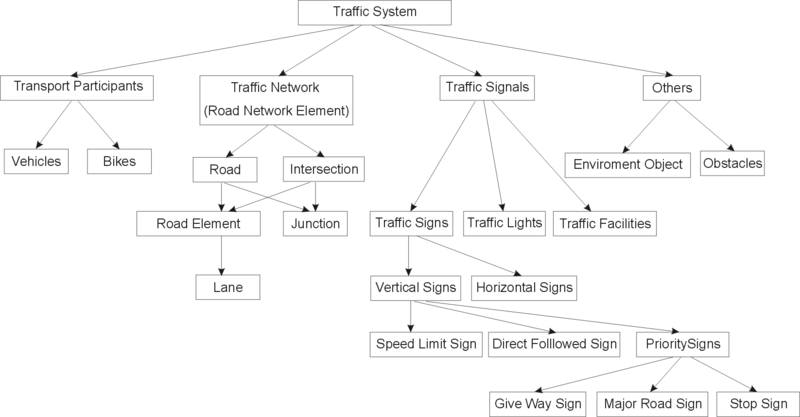
Onthology building
We are also building massive onthology for our use-case, the traffic system. The basic level is demonstrated at the figure below.